
-
-
微信:同手机
-
-
邮箱:sales@gtktech.com
联系方式
微信公众号
加泰科GTK-R07航空物探行业解决方案
光泵磁力仪是以氦等气体以及碱金属钾、铷、铯等元素的原子在外磁场中产生的塞曼分裂为基础,并采用光泵和磁共振技术研制成的磁力仪。光泵磁力仪是成熟商用总场磁力仪中精度最高的一种磁力仪。为了适合搭载飞行,GTK-R07铷测量系统采用微机电技术实现的芯片级原子光泵磁力仪,集成了高精度三分量磁力仪,GPS,激光高度计,9轴姿态传感器,气压高度计,使用业内成熟的固定翼航磁补偿技术,实时或飞行后补偿方法将飞行器机动飞行时,对磁力仪探头产生的干扰,采用软件补偿的方法去除掉。该系统是目前已知商用的最轻型的垂起固定翼无人机光泵航磁补偿系统。
该航磁补偿系统,从软件通讯到硬件集成,深度融合于CW-15飞行平台中,为行业用户提供了航磁航测一站式解决方案。深受业内专家好评。
项目 | 参数 |
地面静态噪声水平 | 0.01 nT (四阶差分法,国标航磁一级) |
分辨率 | 0.0001nT |
灵敏度 | 0.02nT/√Hz (0.1-100 Hz频带,功率谱) |
测量死区 | 单一赤平面,± 7 度 |
量程 | 1000 nT - 100000 nT |
电源及功耗 | 5V,探头及频率计 2 W(工作) , 3W(启动时) |
工作温度 | -30C to +60C |
校准 | 不需要 |
最大梯度容差 | 1000 nT/cm |
重量 | 18 g (探头)/100g(频率计数器) (未含连接线) |
探头尺寸 | 19x19x47 mm (探头) |
项目 | 参数 |
磁通门轴数 | 3 (右手XYZ坐标系) |
测量范围 | ±100μT |
内部噪声:低噪 | 在1Hz时,≈10pTrms/√Hz |
预热时间 | 15分钟 |
偏移误差 | 在零场中±100nT |
比例误差 | 直流时,±0.5% |
偏移误差的温度系数 | 1nT/℃ |
正交误差 | 轴间误差小于1° |
数字输出静态噪声水平 | <0.2 nT 5Hz |
数字采样率 | 10Hz-1Hz |
微小型多路数据采集器 | 24位高速ADC数据采集器,4核ARM Cortex-A53, 1.2GHz CPU,USB数据储存 12参数校正计算对磁通门磁力仪进行轴向干扰,比例系数,正交度误差和软铁效应的修正 |
9轴加速度计陀螺仪姿态角测量模块/气压计 分辨率:加速度:6.1e-5g,角速度:7.6e-3°/s。 稳定性:加速度:0.01g,角速度 0.05°/s。 姿态测量稳定度:0.01° | |
GPS接收机 2m精度,支持GPS及北斗导航卫星 | |
航磁地面站系统 | Windows航磁数据记录处理软件,飞行后数据清理,数据分析,补偿参数计算磁通门磁力仪12参数数字补偿算法及光泵磁力仪补偿技术 |
CW-007垂直起降固定翼无人机参数
无人机特性 | 参 数 |
最大起飞重量 | 6.8Kg |
任务载荷 | 0.8kg |
最佳巡航空速 | 65km/h |
最大飞行空速 | 105km/h |
垂直起降动力 | 电机 |
平飞动力 | 电机 |
续航时间 | 55min(搭载航磁传感器) |
翼展 | 2.2m |
机身长度 | 1.3m |
实用升限 | 6000m |
最高起飞海拔 | 4500m |
使用环境温度 | -30℃~50℃ |
垂直方向定位精度 | 3cm |
水平方向定位精度 | 1cm+1ppm |
起降方式 | 垂直起降 |
防雨能力 | 小雨小雪(降雨量≤10mm/24h) |
抗风能力 | 6级风 |
控制距离 | 30km |
包装箱尺寸 | 1200×500×400mm |
系统采用18项系数补偿算法,使用软件补偿方式对数据进行补偿。系统使用矢量磁力仪的三份量作为姿态因子,将飞行器的永久磁场,感应磁场和涡流磁场通过算法从总场中去除。
在离地面尽量远的磁场平缓地带,根据预先四边飞行的数据,估算出18项系数。在随后的实际工作调查飞行中,使用18存储项系数来对采集到的数据进行软件处理。
干扰改进比率 (总场): 10-20倍 (典型值,不同飞行平台结果不一,干扰越小的系统,改进比率越低)
磁通门磁力仪12参数数字补偿算法,获得轴向干扰,比例系数,正交度误差和软体效应的12个修正参数,可对磁通门磁力仪输出的总场进行实时补偿。
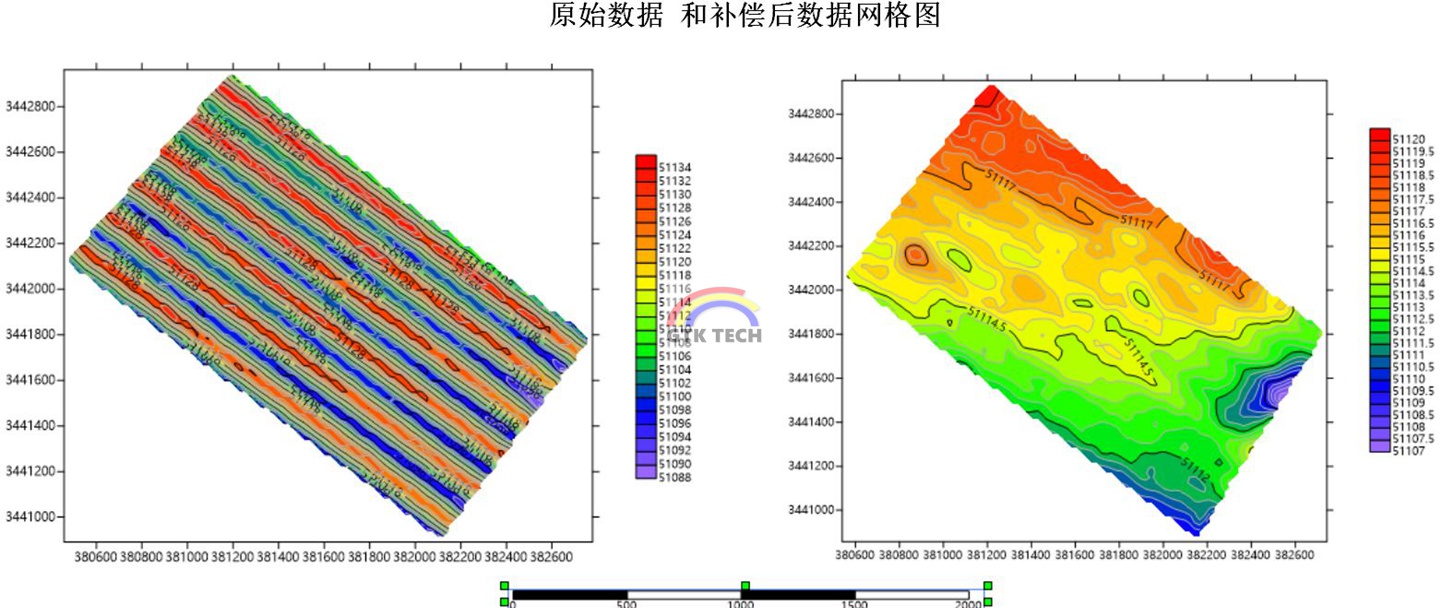
原始数据 和补偿后数据网格图对比
加泰科GTK-R07航空物探行业解决方案
光泵磁力仪是以氦等气体以及碱金属钾、铷、铯等元素的原子在外磁场中产生的塞曼分裂为基础,并采用光泵和磁共振技术研制成的磁力仪。光泵磁力仪是成熟商用总场磁力仪中精度最高的一种磁力仪。为了适合搭载飞行,GTK-R07铷测量系统采用微机电技术实现的芯片级原子光泵磁力仪,集成了高精度三分量磁力仪,GPS,激光高度计,9轴姿态传感器,气压高度计,使用业内成熟的固定翼航磁补偿技术,实时或飞行后补偿方法将飞行器机动飞行时,对磁力仪探头产生的干扰,采用软件补偿的方法去除掉。该系统是目前已知商用的最轻型的垂起固定翼无人机光泵航磁补偿系统。
该航磁补偿系统,从软件通讯到硬件集成,深度融合于CW-15飞行平台中,为行业用户提供了航磁航测一站式解决方案。深受业内专家好评。
项目 | 参数 |
地面静态噪声水平 | 0.01 nT (四阶差分法,国标航磁一级) |
分辨率 | 0.0001nT |
灵敏度 | 0.02nT/√Hz (0.1-100 Hz频带,功率谱) |
测量死区 | 单一赤平面,± 7 度 |
量程 | 1000 nT - 100000 nT |
电源及功耗 | 5V,探头及频率计 2 W(工作) , 3W(启动时) |
工作温度 | -30C to +60C |
校准 | 不需要 |
最大梯度容差 | 1000 nT/cm |
重量 | 18 g (探头)/100g(频率计数器) (未含连接线) |
探头尺寸 | 19x19x47 mm (探头) |
项目 | 参数 |
磁通门轴数 | 3 (右手XYZ坐标系) |
测量范围 | ±100μT |
内部噪声:低噪 | 在1Hz时,≈10pTrms/√Hz |
预热时间 | 15分钟 |
偏移误差 | 在零场中±100nT |
比例误差 | 直流时,±0.5% |
偏移误差的温度系数 | 1nT/℃ |
正交误差 | 轴间误差小于1° |
数字输出静态噪声水平 | <0.2 nT 5Hz |
数字采样率 | 10Hz-1Hz |
微小型多路数据采集器 | 24位高速ADC数据采集器,4核ARM Cortex-A53, 1.2GHz CPU,USB数据储存 12参数校正计算对磁通门磁力仪进行轴向干扰,比例系数,正交度误差和软铁效应的修正 |
9轴加速度计陀螺仪姿态角测量模块/气压计 分辨率:加速度:6.1e-5g,角速度:7.6e-3°/s。 稳定性:加速度:0.01g,角速度 0.05°/s。 姿态测量稳定度:0.01° | |
GPS接收机 2m精度,支持GPS及北斗导航卫星 | |
航磁地面站系统 | Windows航磁数据记录处理软件,飞行后数据清理,数据分析,补偿参数计算磁通门磁力仪12参数数字补偿算法及光泵磁力仪补偿技术 |
CW-007垂直起降固定翼无人机参数
无人机特性 | 参 数 |
最大起飞重量 | 6.8Kg |
任务载荷 | 0.8kg |
最佳巡航空速 | 65km/h |
最大飞行空速 | 105km/h |
垂直起降动力 | 电机 |
平飞动力 | 电机 |
续航时间 | 55min(搭载航磁传感器) |
翼展 | 2.2m |
机身长度 | 1.3m |
实用升限 | 6000m |
最高起飞海拔 | 4500m |
使用环境温度 | -30℃~50℃ |
垂直方向定位精度 | 3cm |
水平方向定位精度 | 1cm+1ppm |
起降方式 | 垂直起降 |
防雨能力 | 小雨小雪(降雨量≤10mm/24h) |
抗风能力 | 6级风 |
控制距离 | 30km |
包装箱尺寸 | 1200×500×400mm |
系统采用18项系数补偿算法,使用软件补偿方式对数据进行补偿。系统使用矢量磁力仪的三份量作为姿态因子,将飞行器的永久磁场,感应磁场和涡流磁场通过算法从总场中去除。
在离地面尽量远的磁场平缓地带,根据预先四边飞行的数据,估算出18项系数。在随后的实际工作调查飞行中,使用18存储项系数来对采集到的数据进行软件处理。
干扰改进比率 (总场): 10-20倍 (典型值,不同飞行平台结果不一,干扰越小的系统,改进比率越低)
磁通门磁力仪12参数数字补偿算法,获得轴向干扰,比例系数,正交度误差和软体效应的12个修正参数,可对磁通门磁力仪输出的总场进行实时补偿。
原始数据 和补偿后数据网格图对比




